CU Rover Team
CU Rover Team
The drive system of the rover incoroporates all the basic mobility aspects and teleoperation. Being a core aspect of it and thus participating in all missions, this system contains mains aspects and projects that make these features possible.
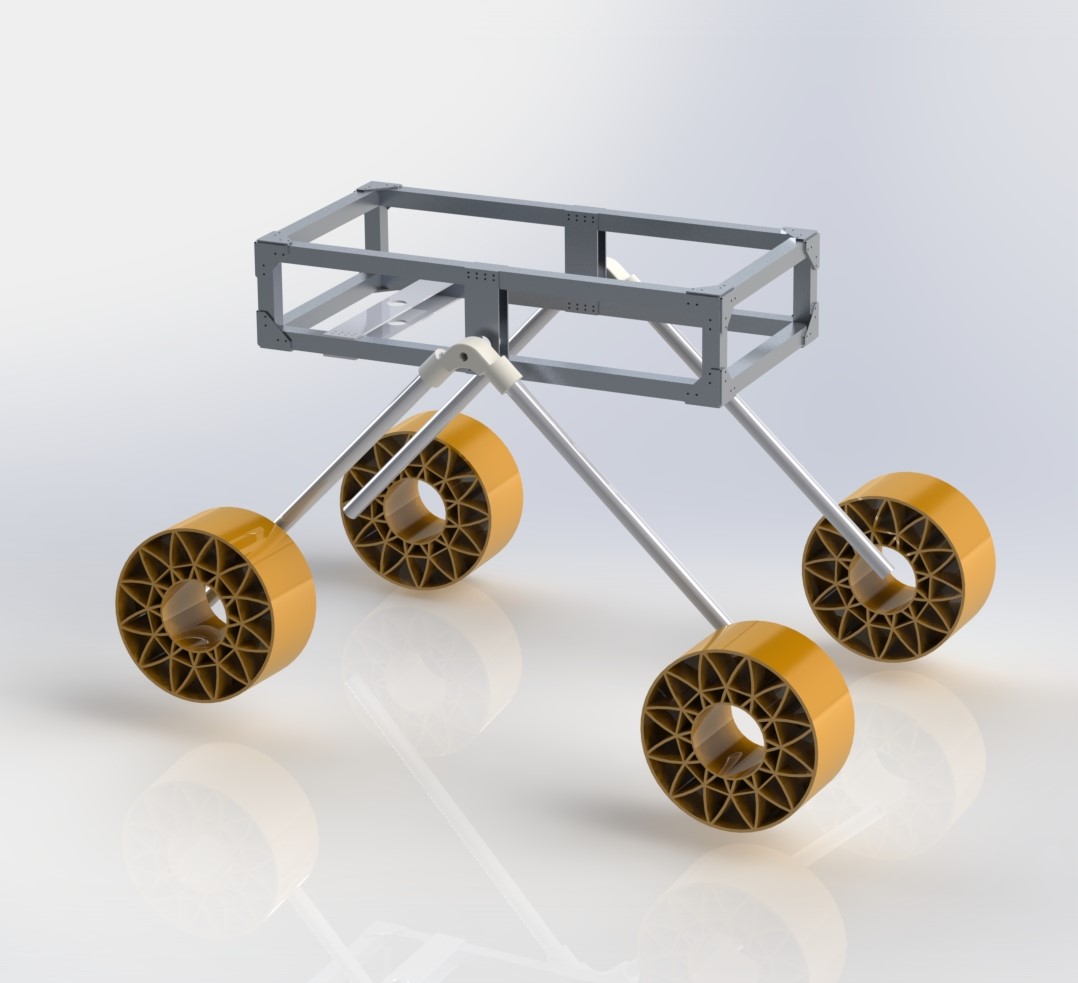
Our chosen suspension is a rocker suspension. It attaches two wheels to a structure on both sides of the robot together to pivot around the center or the robot. Each structure is mounted in such a way that if one spins clockwise the other spins counter clockwise. This is accomplished on our rover by using a system of levers. If the rover encounters a rock and goes over it, one wheel is lifted up and the other wheel pushes into the ground to keep the rover body level.
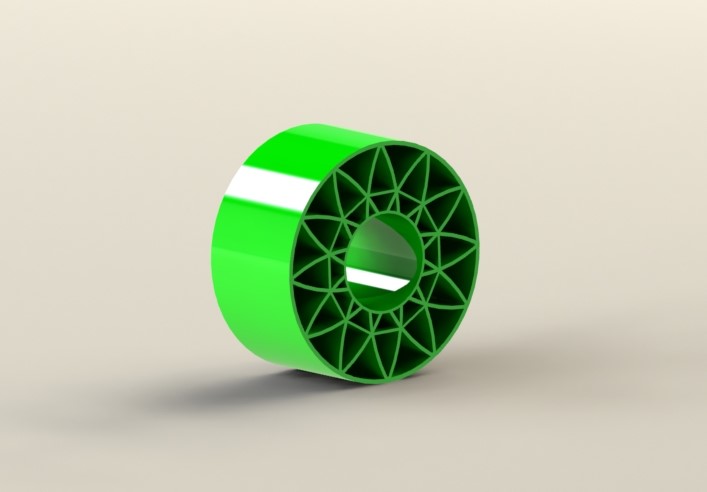
The wheels are made from TPU, a flexible filament. Combined with the petal like structure, it acts as a supplemental suspension system that helps to absorb shocks as the rover navigates the terrain, in addition to reducing damage to the onboard components and systems.
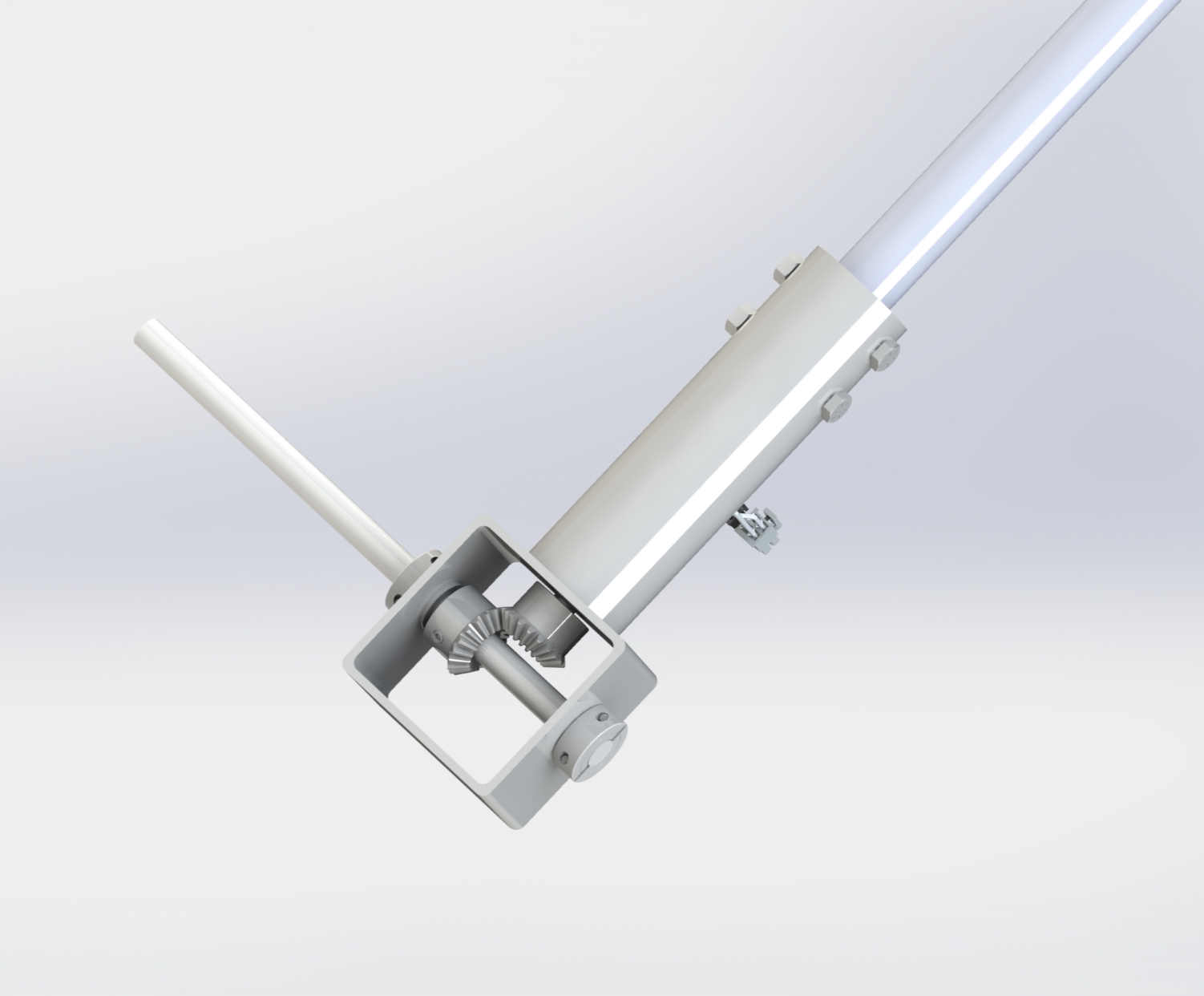
A motor mount system is needed to alleviate the weight on the motor shaft. Our design includes mounting the motor directly into the leg of the rover and using a gearbox system to transfer the power into the wheel.
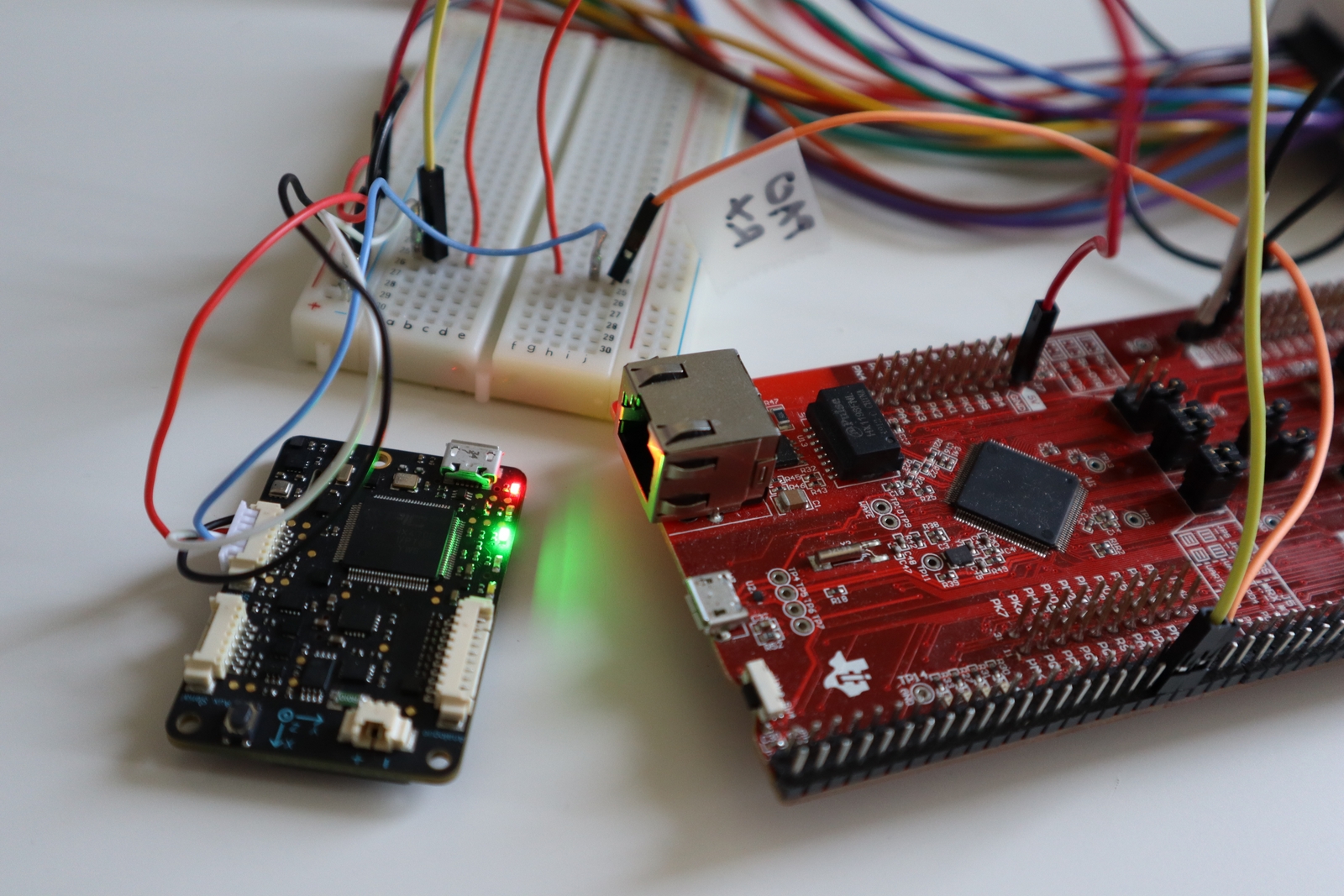
The rover uses an MSP432E401Y microcontroller capable of using a high speed ethernet connection in order to commicate with the on-board Jetson computer running ROS. This allows for communicating efficiently with all onboard systems including motor controllers and localization sensors.

The rover's operator can teleoperate the rover using any gamepad interfacing with our custom ROS packages that leverage the already-existing Twist and EKF packages.

The entire rover's system depends on the power distribution to operate. This takes into account using harnesses that interface major components like motors to our high-capacity LiPo battery.
The mechanical aspect of the arm is designed in SolidWorks, one of the leading programs used for example by Northrop Grumman and NASA.
Rapid prototyping has become increasingly popular for proofs of concept. 3D printing also allows to experiment with different materials like PETG, PLA, TPU, and ABS.
Altium is a leading PCB design software that is a current industry standard. This provides the opportunity to develop circuit skills to real world designs and constraints.

